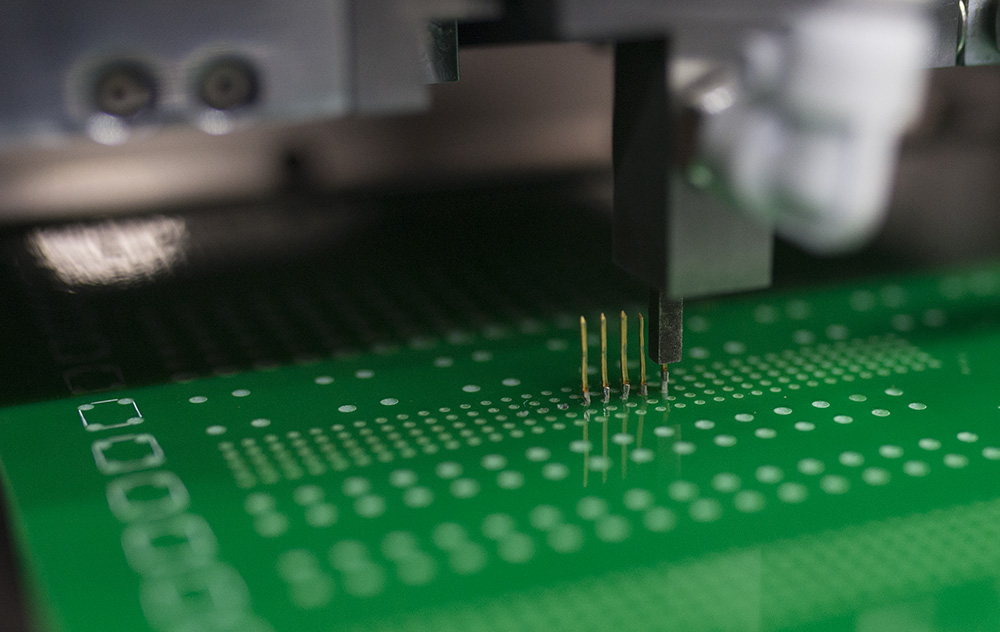
The S-7000 pin inserter is a custom-made model for square pin insert.
PC control,servo motor drive,vision programming.SMEMA connector.


|
Speed |
12,000 CPH Spec |
|
PCB Size |
Max. 480mm * 480mm |
|
PCB Thickness |
0.76-2.36mm |
|
Insert Head |
1 |
|
Machine dimension |
2300mm*1340mm*1860mm (L*W*H) |
|
Machine weight |
1500KG |
|
Power supply |
Single Phase 220VAC, 50/60HZ, 1.0KVA |
|
System Protection |
UPS |
|
Air pressure |
0.4-0.6Mpa (Round pin 0.55-0.6Mpa)/0.3M3/Min |
|
Data input |
USB interface input (EXCEL format) |
|
Control System |
English version interface (WINDOWS system control platform) LCD monitor |
|
PCB transfer mode |
automatic load / unload |

Want more information,pls leave a comment